Interface graphique
|
|
Contents
- 1 Introduction
- 2 Modèle client/serveur générique
- 3 Interfaces Dash::Controller
- 4 Utilisation de Dash
1 Introduction
L'architecture est déjà mise en place via un client/serveur générique.
2 Modèle client/serveur générique
Il faut comprendre que le controleur, tout comme son interface graphique sont à la fois client et serveur.
- Serveur spécifique
- serveur de SOCKET par exemple
- Contrôleur
- client SOCKET par exemple
- serveur CORBA
- GUI du contrôleur
- client CORBA
- serveur CORBA
- GUI caméra
- client CORBA
3 Interfaces Dash::Controller
$ echo $HESSUSER /home/roche/hess $ cd ~/hess $ cvs co dash $ cd dash && make
L'interface spécifie l'objet vu par le serveur.
Cf fichier /hess/dash/idl/Dash.idl
Les méthodes disponible pour la classe Controller sont implémentées ici :
- /hess/dash/python/Server.py
Cette classe implémente les mécanismes de base propre à chaque serveur CORBA.
- Le constructeur contacte les servers POA (Portable Object Adapter).
print "Initializing ORB" orb = CORBA.ORB_init(options, CORBA.ORB_ID) poa = orb.resolve_initial_references("RootPOA") rootContext=orb.resolve_initial_references("NameService")._narrow(CosNaming.NamingContext) poaManager = poa._get_the_POAManager() poaManager.activate() thread.start_new_thread(startorb,()) find_server(self,name): Find a server with a given name, and try to contact it
Voici les méthodes publiques :
Delete // Terminate the server processPing // Check if the connection is upInitialized // Check if the process is initialized ; To be overloaded
- Le constructeur contacte les servers POA (Portable Object Adapter).
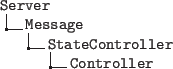
- /hess/dash/python/Message.py
Cette classe ajoute une couche permettent le débugage équivalente au démon SYSLOG.
Voici les méthodes publiques :
- AddMessageReceiver
- RemoveMessageReceiver
- TakeMessage
- Take
- /hess/dash/python/StateController.py
Cette classe fait de chaque controleur une machine à état.
Par ailleurs, cet objet fait intervenir la notion de thread. Les commandes sont alors suspendues/annulées... par ce biais.
Voici les méthodes publiques :
- GetState
- GetProcessStatus
- SetProcessStatus
- GetTransition
- IsInTransition
- Action
- TakeRunParameters
- GetRunParameters
- GotoSafe
- Configure
- Start
- Stop
- Resume
- Interrupt
- IniGotoSafe
- IniConfigure
- IniStart
- IniStop
- IniPause
- IniResume
- Controller
Cette classe virtuelle pure, en plus des classes décrites ci-dessus, hérite d'autres classes mais qui ne sont pas implémentées.
Nos objets implémenterons cette classe.
remarque: En python les méthodes virtuelles pures peuvent ne pas être implémentées.
4 Utilisation de Dash
Nous intégrons l'architecure générique via la classe Controller :
- Dans notre interface IDL
#include "Dash.idl" module Onlinecalibrator { interface Controller: Dash::Controller - Dans notre serveur, la place de la première classe héritée étant imposée (sinon le client ne se connecte pas),
on en déduit que c'est elle qui joue le rôle déterminant.
from dash.python import StateController class OnlinecalibratorController_i(Onlinecalibrator__POA.Controller, StateController.StateController_i): def __init__(self, name, ledServer, ledPort): StateController.StateController_i.__init__(self,name,options=["-ORBclientCallTimeOutPeriod","600000"]) - Dans notre client on retrouve également l'implémentation de la classe
StateController. La méthodefind_serverde l'instance locale (self.controller) permet d'initialiser l'instance distante (self.server). Dès lors l'instance locale ne sert plus.from dash.python import StateController,Server,Message import Dash, Dash__POA class OnlinecalibratorUIController(StateController.StateController_i): def __init__(self, name = "Onlinecalibrator/GUI", options = ["-ORBclientCallTimeOutPeriod","600000"]): StateController.StateController_i.__init__(self,name = name,options = options) class OnlinecalibratorUI: def __init__(self,name = "Onlinecalibrator/GUI"): self.controller = OnlinecalibratorUIController(name = name) self.find_controller() def find_controller(self): """Try to find the controller """ name = "Onlinecalibrator/Controller" self.server = self.controller.find_server(name) if self.server is not None: self.server = self.server._narrow(Onlinecalibrator.Controller)
Un exemple d'utilisation est donné dans la section contrôleur
| Home | Up |