Bunny
|
|
Contents
1 Introduction
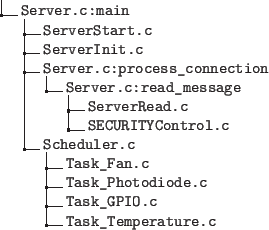
Implémentation du serveur Bunny.
L'arborescence ci-dessous montre comment le code du LAPP (les feuilles) est appelé à partir de la mise en marche du serveur.
A l'initialisation, bunny met en route les ventilateurs de la façon suivante (selon le pilot) :
26 7 9f26 8 9f26 9 9f26 a 9726 0 ff26 1 ff
2 Répertoires
- Server : Main
- Control : Analyseurs Grammaticaux
- Scheduler : Threads Panazol + Wiener
- Util : Misc + parser Panazol
- Board : ioctls Panazol
3 Comportement
Les 4 thread sont lancés périodiquement selon les fréquences inscrites dans les fichier include.
Le controleur corba est bloqué durant les connexion tant que celle-ci ne se lancent pas dans un thread. Ce comportement est hérité de Big.
4 Remontées des messages d'erreur
A priori les erreurs atteignent le contrôleur camera. Comment le contrôleur sécurité peut-il s'inscrire afin que Bunny lui envoit ses erreurs ?
Il faudrait que le contrôleur sécurité ait une fonction "CameraMessage" calculée sur
celle du CameraControleur.
Voir dans Camera2.idl:
// Callback - Messages from the CPU
void CameraMessage(in Dash::BlockAcceptor::Block data);
Ensuite, il faut envoyer à Bunny l'adresse corba. Dans CameraInterface_BigD.py:
##
## Send the controller node to the camera
## @param name CORBA address of Controller
def SendControllerOp(self,name):
self.Print("Send the controller node for %s"%(name))
try:
command = "BEGIN\nNODE CONTROLLER %s\nENDMSG"%(self.create_nodes_op(name,"CameraMessage"),)
self.send_command(command)
except Exception,x:
traceback.print_exc()
raise Camera2.CameraError("While contacting camera : %s"%str(x))
return
| Home | Up |
This document is also available in PDF and PostScript format.